Quest2ROS: An App to Facilitate Teleoperating Robots
Quest2ROS enables the user to set an IP and PORT to connect to a ROS node via the ROS-TCP-Connector via a VR interface. The app publishes the relative position and orientation (as PoseStamped), the velocity (Twist), and the button presses of both controllers (custom ROS message). It offers a subscriber for haptic feedback (frequency and amplitude of controller vibration) for each controller. Ideal to set up a teleoperation for robots running ROS.
Download Preprint
The Quest2ROS app is avalible on the new project site
old site here for archive purposes - is depricated
Performance
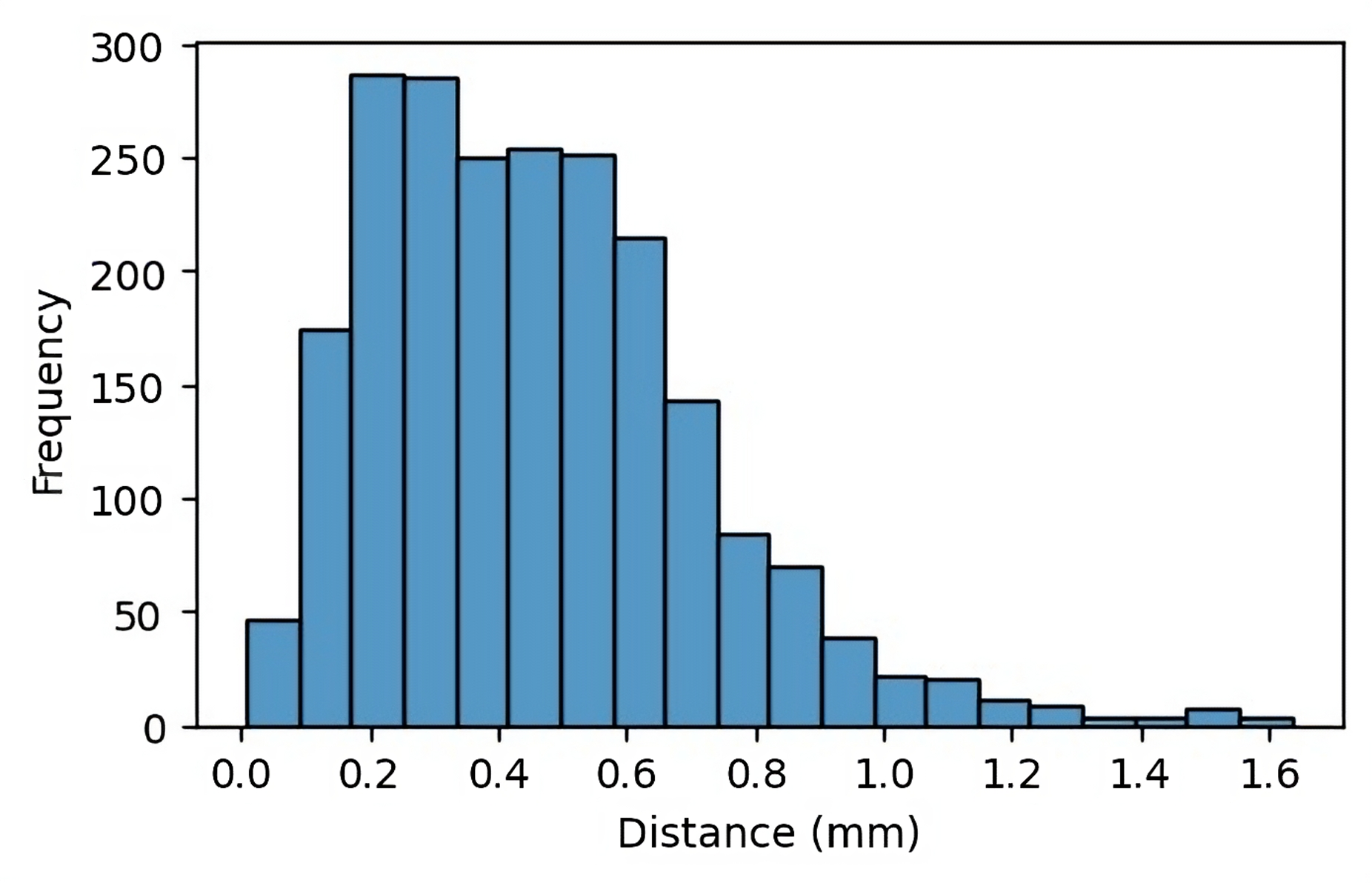
Accuracy
Mean accuracy from approximately 1 meter was estimated using 2180 data points to be 0.46 mm
Latency
Mean latency was masured over eight trails to be 82 ms
Frequency
Mean Frequency was masured over all topics to be 71.86 Hz
| Topic | Frequency |
|---|---|
| /q2r_left_hand_pose | 72.08 HZ |
| /q2r_left_hand_twist | 71.83 HZ |
| /q2r_left_hand_inputs | 71.83 HZ |
| /q2r_right_hand_pose | 71.87 HZ |
| /q2r_right_hand_twist | 71.78 HZ |
| /q2r_right_hand_inputs | 71.81 HZ |
Use the following to cite us:
@inproceedings{welle2024quest2ros,
title={Quest2ROS: An App to Facilitate Teleoperating Robots},
author={Welle, Michael C and Ingelhag, Nils and Lippi, Martina and Wozniak, Maciej and Gasparri, Andrea and Kragic, Danica},
booktitle={7th International Workshop on Virtual, Augmented, and Mixed-Reality for Human-Robot Interactions},
year={2024}
}
Contact
- Michael C. Welle; mwelle(at)kth.se; KTH Royal Institute of Technology, Sweden